Available — Full-Time Roles, May 2026
Sidharth
Sidharth
Jain
Robotics & Embedded Systems Engineer
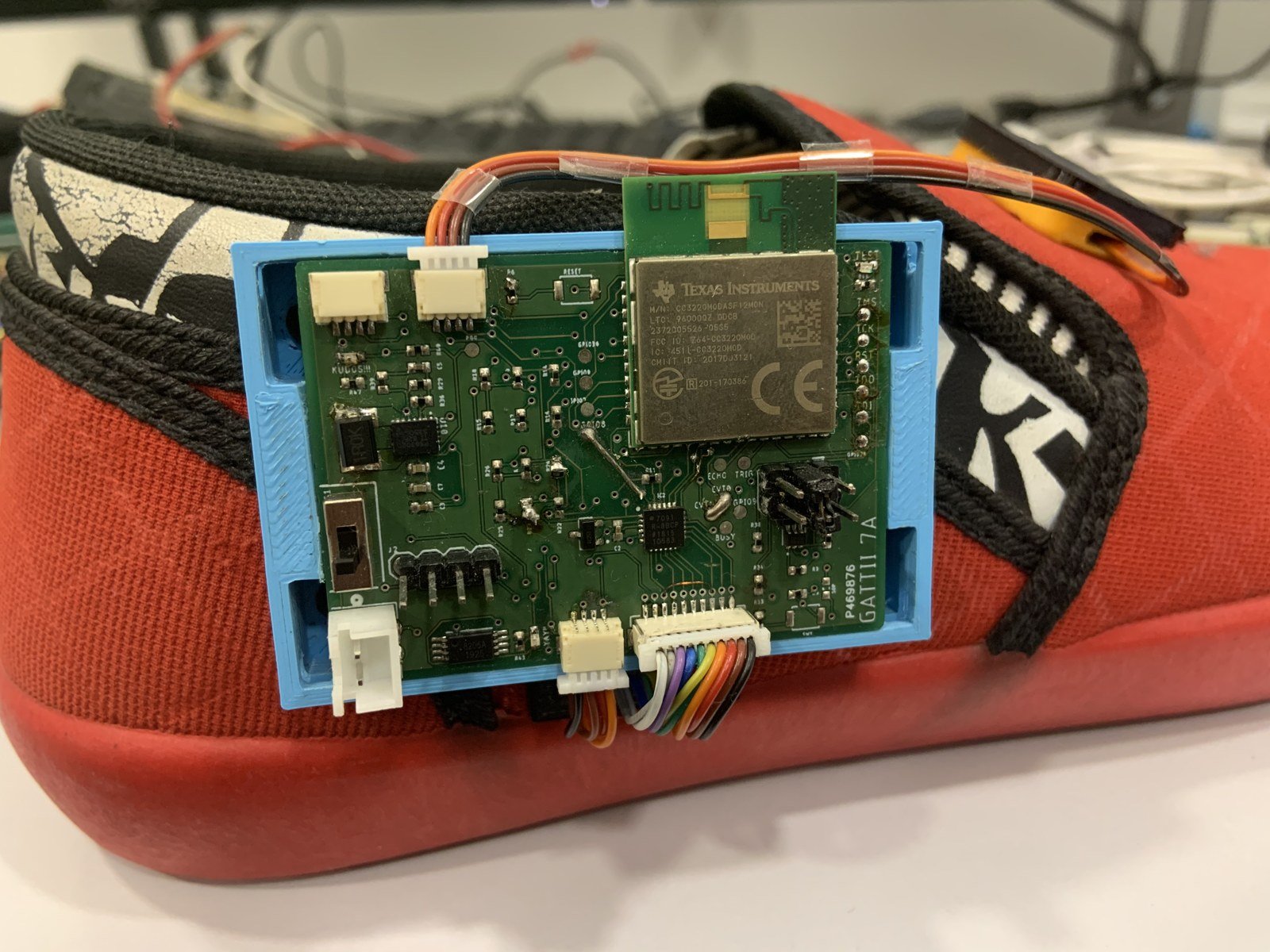
I build robotics systems that deploy in the real world — from PCB design to clinical validation. Not just prototypes. Seven iterations. 100+ patient deployments. Patented. Funded. Validated by clinicians.
100+
Patients
$120K
Funded
2
Patents
200+
Students



Scroll